生命科学
物理科学
 牛津仪器集团成员
牛津仪器集团成员

牛津仪器 Andor sCMOS 相机是自适应光学波前传感的理想选择,高度并行的像素读出产生的高帧频,结合短曝光条件下的低噪声和高量子效率能够获得极佳信噪比图像。在本次技术说明中,我们比较了Andor sCMOS 系列中三款特别适合波前传感的相机:
Marana 4.2B-6(具有CoaXpress接口)
Zyla 4.2 PLUS(具有CameraLink接口)
Balor 17F(具有CoaXpress接口)
下表总结了每款相机的关键性能参数。
| Model | Array Format | Pixel Pitch (µm) | Sensor Diagonal (mm) | Frame Rate (16-bit, full array) | Read Noise (median, e-) | QE Max (%) |
| Marana 4.2B-6 | 2048 x 2048 | 6.5 | 18.8 | 74 | 1.6 | 95 |
| Zyla 4.2 PLUS | 2048 x 2048 | 6.5 | 18.8 | 100 | 0.9 | 82 |
| Balor 17F | 4128 x 4104 | 12 | 70 | 54 | 2.9 | 61 |
表1 – 用于波前传感的三款 Andor sCMOS 相机的关键成像参数
在第 1 部分中,我们将详细分析潜在的帧频性能,尤其是 ROI 模式下帧频的提升。
在第 2 部分中,我们将比较三款相机相对“延迟”特性,这是自适应光学应用的一个重要考虑因素,因为它决定了图像在软件中的准备时间,以便作为闭环可变形镜像系统的一部分进行处理。
高速帧频性能对于波前传感至关重要,使用(ROI)子阵列能够实现每秒数百帧的图像采集。作为波前传感备选的成像探测器,表 2 显示了上述三款 sCMOS 相机在不同 ROI 阵列尺寸上的帧频。
表 2 的关键成像参数(可用选项):
卷帘快门曝光模式
重叠(100%占空比)模式
16位(全动态范围)模式
中心 ROI 成像
CoaXpress(CXP)接口(Marana 和 Balor); CameraLink(CL)接口(Zyla)
| Array/ROI | Marana 4.2B-6 | Zyla 4.2 PLUS | Balor 17F |
| 4128 x 4104 | N/A | N/A | 54 |
| 2048 x 2048 | 74 | 100 | 108 |
| 1024 x 1024 | 148 | 202 | 205 |
| 512 x 512 | 295 | 406 | 431 |
| 128 x 128 | 1166 | 1627 | 1684 |
表2 – 三款 Andor sCMOS 相机在不同 ROI 阵列尺寸上的帧频
请注意,在比较 Marana 和 Zyla(均为2048 x 2048阵列)时,尽管 Zyla 能够实现更快的帧频,但 Zyla 是使用前照式芯片,通过在每个像素上使用微透镜来实现高量子效率。Marana 使用背照式芯片,在没有微透镜的情况下可实现高达95%的量子效率。
此外,如果 Zyla 的 ROI 没有在垂直方向上居中,帧频将会降低(降低到原来的2倍),而对于Marana 和 Balor,ROI 可在任何区域,帧频的降低可以忽略不计。
科学成像相机用作波前传感器的一个关键考虑因素是“延迟”。由于波前传感成像是 AO 配置闭环系统的一部分,因此软件必须快速采集图像以进行实时处理,以便它能够持续地通知变形镜系统如何在到达科学探测器的过程中对入射波前进行重塑和展平。
比较波前传感器相机,我们需要清楚地了解曝光、传感器读出和任何图像传输耗时相关的相对时间。
在成像的时序流程中,对于“延迟”的定义可能存在一些主观的变化。为了在当前的比较研究中实现标准化,我们将考虑从曝光开始到软件处理该曝光时间内的完整图像/ROI 的整个端到端时间。我们还将通过假设曝光时间为 10 毫秒(帧频达到100 fps)进行标准化。但是请注意,我们比较的三款相机,这 10 毫秒的曝光对应于不同的 ROI 阵列大小和相应的视野。
图 1 和图 2 为 Zyla 4.2 PLUS 与 Marana 4.2B-6 进行比较的时序示意图。sCMOS 相机之间的“延迟”区别如下:
• Zyla 必须先将整个 ROI 阵列(10 毫秒)读出到组装图像的相机 FPGA,然后再通过 CameraLink 接口传输图像,这里又需要 10 ms。由于这些过程是按序发生而不是同时进行的,因此整个端到端处理接近曝光(10 ms)+ 读出(10 ms)+ 通过 CameraLink 的数据传输(10 ms)= 30 ms。注意,Zyla图像必须首先在 FPGA上组装的原因是其复杂的传感器读出,这涉及到同时读出阵列的两半,从中间行开始,向外分别移动到顶部和底部行。

• Marana 具有更直接的传感器读出架构,这意味着无需将图像在相机 FPGA上组装后再传输到主机 PC。相反,一旦读出像素行,它就会由 FPGA 处理并立即通过 CoaXpress(CXP)接口进行传输。这意味着图像传输与图像读出同时发生,而不是顺序发生,从而克服了“延迟”造成的影响。 Marana 的整个端到端过程近似于曝光(10 ms)+ 同时读出/数据传输(10 ms)= 20 ms。

• Balor 未在所示的图中具体表示,但具有与 Marana 相似的单向传感器读出架构,区别在于 Balor 通过同时读取每组 4 行的数据来提高速度。因此,如果 Balor 定义了 ROI 阵列,其结果是曝光时间为 10 ms(相应的读数为10 ms),那么 Balor 的整个端到端过程也将近似于曝光时间(10 ms)+ 同时读出/数据传输(10 ms)= 20 ms。

因此,相对于 Zyla 固有的“延迟”, Marana 和 Balor 的“延迟”减少了。然而,如第 1 节所示,Zyla 4.2 PLUS 相对于Marana 4.2B-6 可能具有更高的帧速。在为您的装置选择合适的波前传感成像相机时,应在确切的实验要求范围内考虑这两个因素。
图 1 和图 2 的关键成像参数(可用选项):
曝光时间/读出时间 — 10毫秒(需要选择ROI)
卷帘快门曝光模式
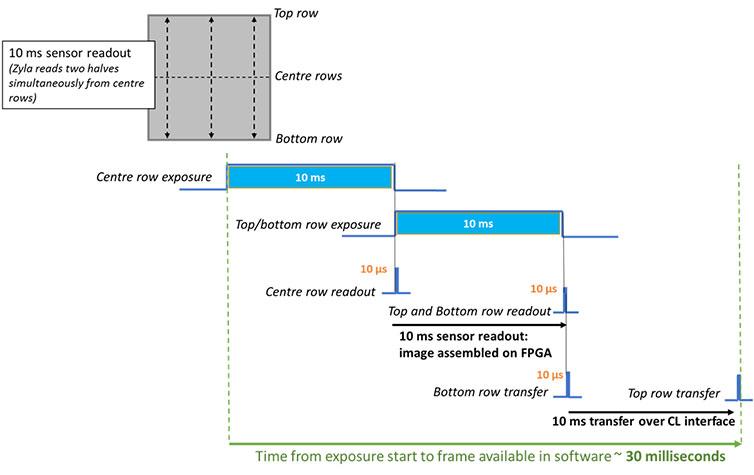
图 1 -Zyla4.2 PLUS:表示曝光、读出和图像传输(通过 CameraLink接口)的计时示意图
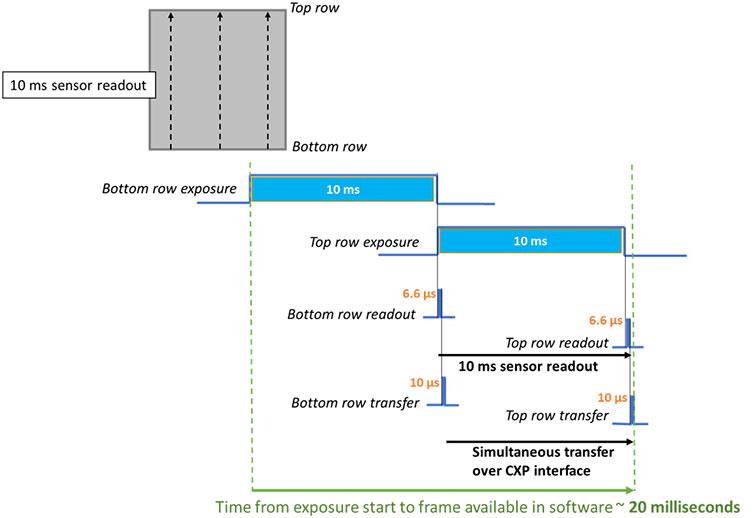
图 2 -Marana 4.2B-6:表示曝光、同时读出/图像传输(通过Coaxress 接口)的计时示意图。Balor 的实验数据接近Marana 4.2B-6
欢迎关注牛津仪器
The Business of Science

400 678 0609 | www.oxinst.cn

© 牛津仪器 2026
 公安机关备案号31010402003473
公安机关备案号31010402003473